Alternativ beinhalten vielleicht diese Webseiten schon Antworten zum Thema :
T
Eine bestimmte Art der dynamischen Abstimmung ...
siehe Winkelbezeichnungen
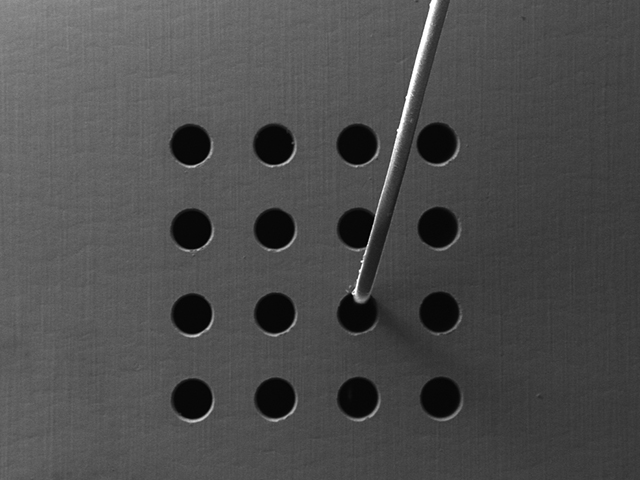
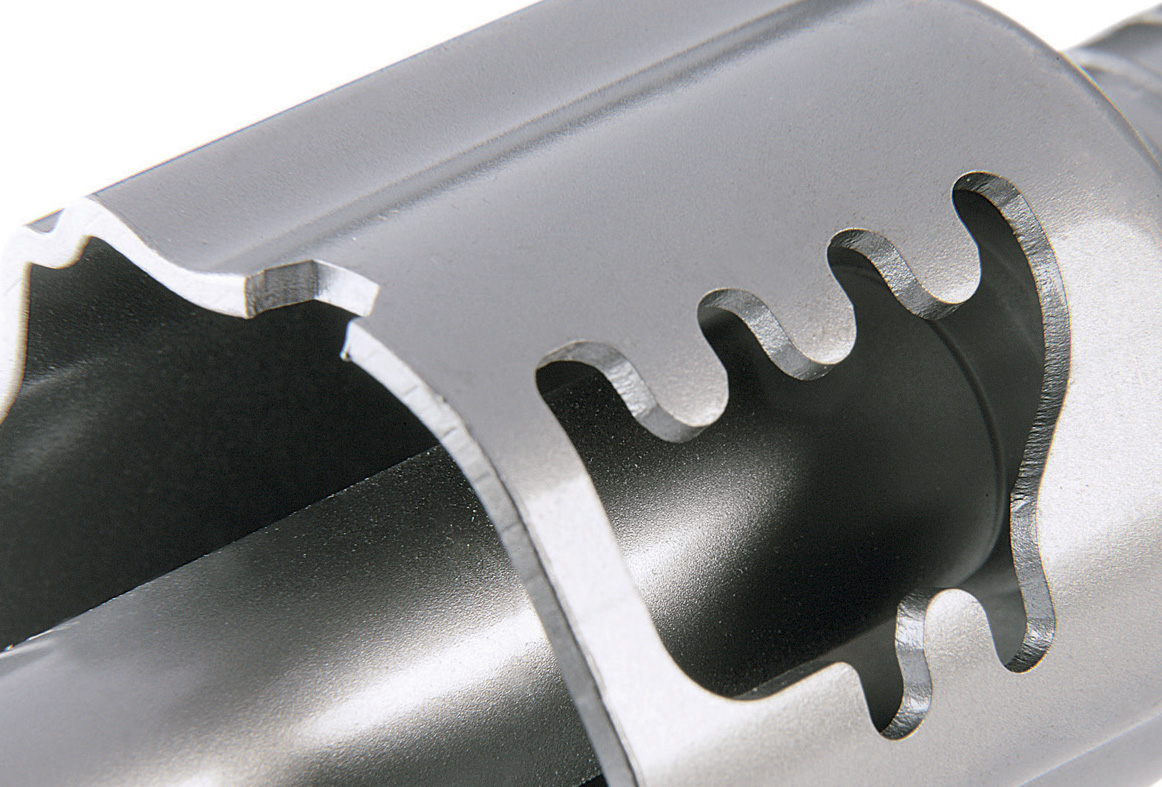
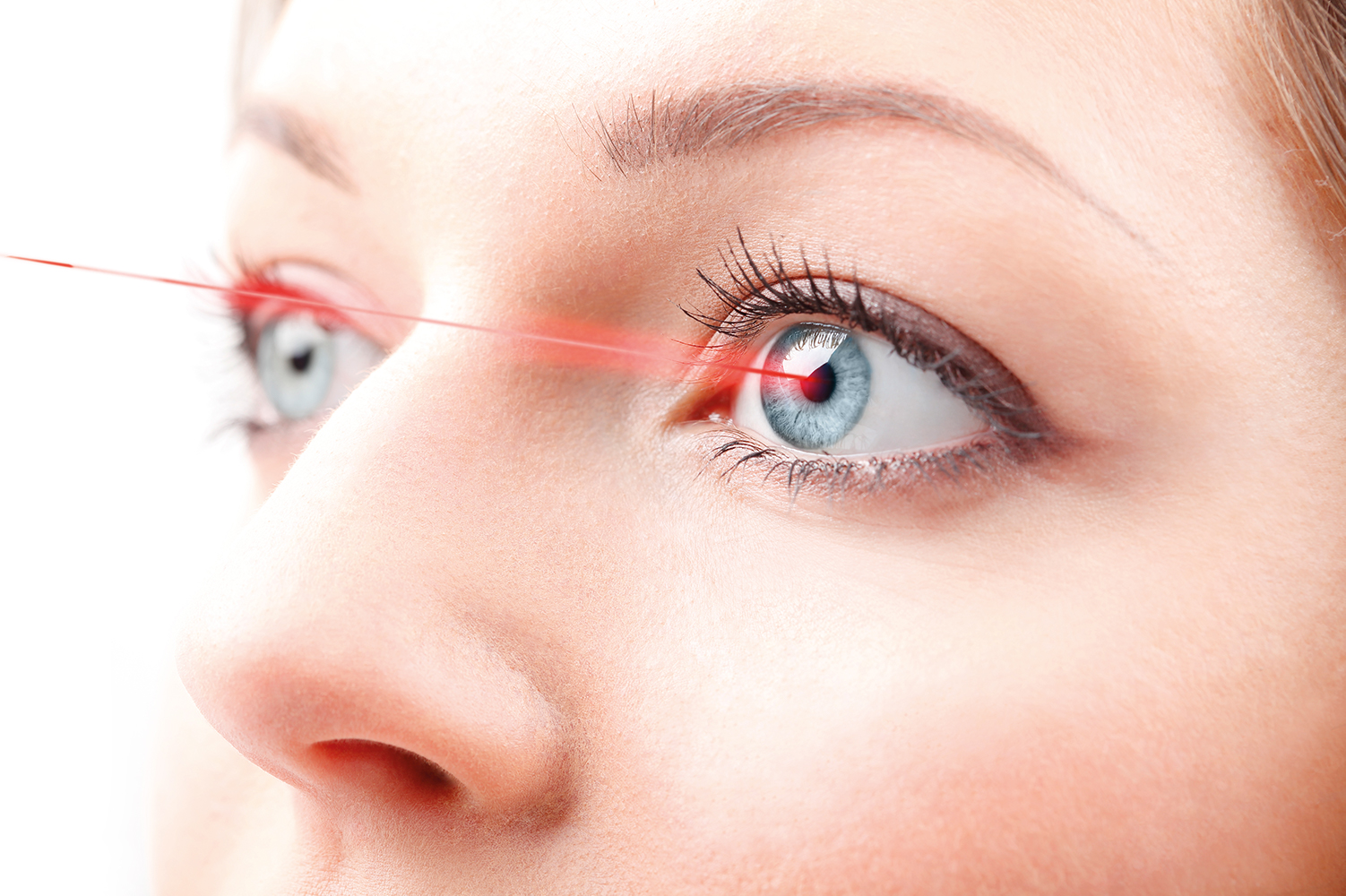
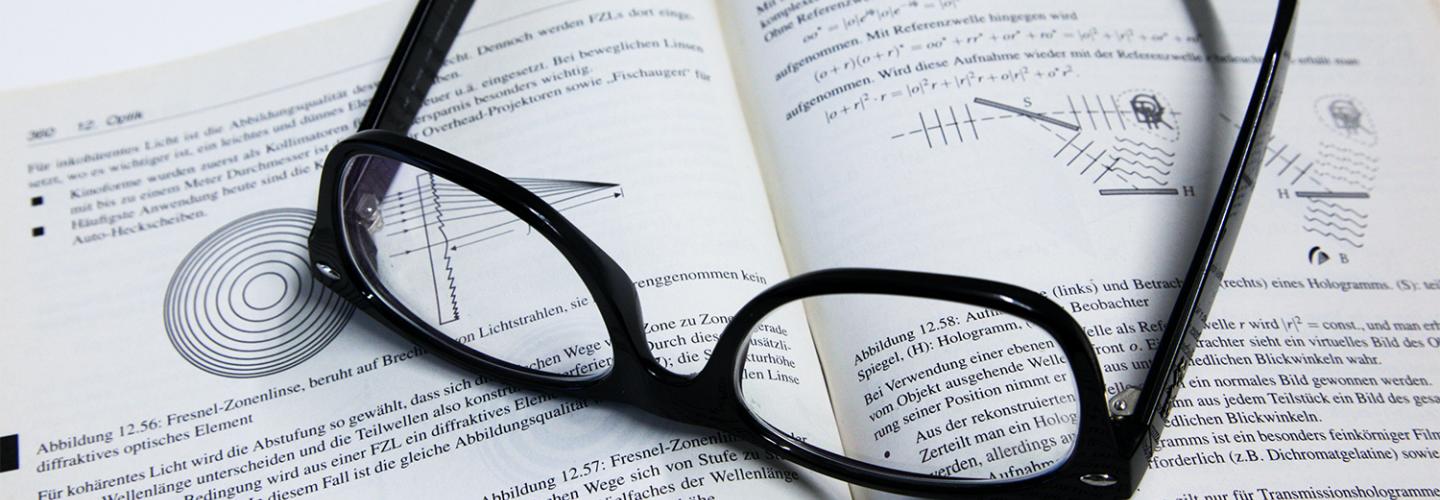
Der Laser als Werkzeug
SCANLABs Scan-Lösungen helfen Materialen u.a. funktionell und wertig zu machen, indem sie Laser in universelle Werkzeuge wandeln. Hierfür bietet Ihnen SCANLAB eine breite Palette an Scan-Lösungen, um Anforderungen wie schneller, genauer, effizienter oder umweltfreundlicher gerecht zu werden.